Motor Overload Protection Explained
By William Conklin, Associate Editor
By William Conklin, Associate Editor
Our customized live online or in‑person group training can be delivered to your staff at your location.

Motor overload protection safeguards electric motors from sustained overcurrent and heat buildup using overload relays and coordinated protection. It prevents insulation damage and premature failure while working alongside short-circuit devices.
Motor overload protection prevents electric motors from overheating under sustained excess current conditions that do not qualify as faults. In practice, this protection becomes critical in applications where motors operate close to their thermal limits for extended periods.
Unlike short-circuit protection, which reacts instantly to catastrophic electrical faults, overload protection responds to time and temperature. That distinction matters. Most motors do not fail because of dramatic electrical events. They fail quietly after repeated thermal stress from mechanical loading, ventilation issues, or subtle system changes that go unnoticed until damage is already done.
Understanding how overload protection works and how it fits into a complete motor branch circuit is one of the most consequential design and maintenance decisions in industrial and commercial electrical systems.
In practice, motors rarely overload because someone “oversized the load.” More often, overload conditions emerge gradually.
A conveyor accumulates product over time. A pump begins to cavitate as process conditions shift. A fan motor pulls higher current after years of dust buildup reduce airflow. Bearings degrade. Alignment drifts. None of these events triggers a short circuit, but all of them push the motor beyond its thermal comfort zone.
Overload protection is in place for these slow failures. It is designed to tolerate normal starting current, accept temporary load variation, and still intervene before heat becomes destructive. When it works properly, it shuts the motor down early enough that a restart is possible after the underlying issue is corrected.
When it is misapplied or incorrectly sized, the motor either trips constantly or never trips at all, both of which lead to operational problems and long-term damage.
Motor overload protection is often misunderstood because it is grouped under the broader category of overcurrent protection.
An overload condition is a sustained rise in current caused by mechanical demand or reduced efficiency. A short circuit is a sudden electrical fault that produces extremely high current almost instantly. Overload devices are intentionally slow. They respond to heat accumulation, not instantaneous current magnitude.
That is why overload relays cannot protect against short circuits. They are not designed to interrupt fault current. Fuses and circuit breakers handle that role, as explained in the broader context of overcurrent protection.
A properly protected motor circuit always includes both functions. Short-circuit protection prevents catastrophic damage. Overload protection preserves motor life.
In a complete motor branch circuit, overload devices operate within a coordinated framework that also includes breaker and relay timing, as explained in relay and circuit breaker coordination.
| Protection Layer | What Triggers It | What It Protects | What It Deliberately Does Not Handle |
|---|---|---|---|
| Motor overload protection | Sustained current above normal operating range, heat buildup over time | Motor windings, insulation life, long-term reliability | Instantaneous faults, short circuits, conductor damage |
| Short-circuit | Sudden, very high fault current from wiring or insulation failure | Conductors, equipment, fault paths | Gradual overheating or mechanical overload |
| Time-delay (inrush tolerance) | High starting current during normal acceleration | Normal motor starting without nuisance trips | Continuous overload conditions |
| Phase loss / imbalance | Missing phase or unequal phase currents | Motors vulnerable to single-phasing damage | Thermal overload caused by mechanical loading |
| Ground-fault | Leakage current to ground | Equipment damage and fire risk reduction | Motor overheating from excess load |
All overload protection devices work on the same basic principle: they estimate motor heating and act before thermal limits are exceeded. How they perform that estimation depends on the technology involved.
Thermal overload relays remain common in traditional motor starters. These devices use bimetallic elements that heat as current flows. When the temperature exceeds a calibrated threshold, the relay trips. Their behavior naturally mimics motor heating and cooling, which is why they have remained effective for decades.
Electronic and solid-state overload relays take a more calculated approach. Instead of relying on physical heating, they measure current electronically and model thermal conditions using time-current algorithms. This allows for greater precision, adjustable trip classes, phase imbalance detection, and integration with control systems.
Magnetic-only devices, while excellent for short-circuit protection, do not provide true overload protection and should not be relied on for motor thermal safety.
Regardless of technology, the objective is the same: allow normal starting current, tolerate short-term overloads, and intervene before damage occurs.
Correct sizing is where many installations fail.
The National Electrical Code treats overload protection differently from short-circuit protection. Article 430 establishes limits based on motor nameplate data, not conductor ampacity.
For motors with a service factor of 1.15 or greater, or a temperature rise of 40 °C or less, overload devices are typically permitted to trip at up to 125 percent of full-load current. Motors without that margin must be protected at no more than 115 percent of full-load current.
Because overload settings depend on available fault levels upstream, designers often review available fault current before finalizing protection schemes.
For example, a motor with a nameplate full-load current of 25 amperes and a service factor below 1.15 would require overload protection set no higher than 28.75 amperes. Exceeding that setting does not improve reliability. It simply delays intervention until damage has already occurred.
This sizing philosophy exists because overload protection is about motor temperature, not conductor protection. Conductors are protected by upstream devices. Overload relays exist to protect windings.
Trip class selection is often treated as a catalog decision. In reality, it is an operational decision.
A Class 10 relay trips quickly and is suitable for motors that accelerate rapidly under normal load. A Class 20 relay allows longer acceleration and is common in pumps, conveyors, and high-inertia loads. Class 30 devices are reserved for applications where long acceleration times are unavoidable.
Think you know Electrical Protection? Take our quick, interactive quiz and test your knowledge in minutes.
Selecting a slower trip class than necessary can mask developing mechanical problems. Selecting one that is too fast results in nuisance trips that operators quickly learn to bypass. Neither outcome protects the motor.
The trip class should reflect how the motor actually starts and runs, not how it looks on paper.
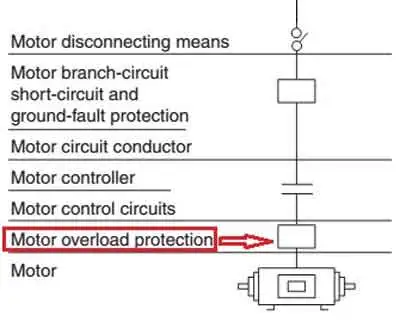
Overload protection never operates alone.
It sits downstream of branch-circuit protection and upstream of the motor windings. Its behavior must coordinate with fuses, breakers, contactors, and control logic.
From a system perspective, motor overload protection is a subset of a broader discipline, power system protection, where selective operation and predictability matter as much as compliance.
Short-circuit protection clears faults instantly. Overload protection clears thermal stress. Ground-fault protection addresses insulation breakdown and leakage paths. Phase-loss detection prevents single-phasing damage that overload relays may not catch quickly enough.
Understanding this layered relationship is essential when reviewing complete motor protection schemes, including relay-based systems discussed under protective relay applications.
Field failures tend to repeat the same patterns.
Overload settings are raised after nuisance trips rather than addressing mechanical causes. Electronic relays are installed but left at factory defaults that do not match motor data. Phase imbalance goes undetected because the relay only monitors the average current. Motors are restarted repeatedly after overload trips without allowing adequate cooling time.
Each of these practices shortens motor life while creating the illusion of reliability.
Good overload protection does not eliminate downtime. It prevents irreversible damage.
As variable-frequency drives become more common, overload protection increasingly shifts into software. Many drives include sophisticated thermal models and protective functions. That does not eliminate the need for understanding overload protection. It changes where decisions are made.
Whether implemented through discrete relays or embedded drive logic, the same principles apply. Motors heat. Heat destroys insulation. Protection must act before that point is reached.
In installations where motors interface with larger electrical assets, overload settings are often reviewed alongside electric motor protection strategies to ensure consistent behavior across the system.
No. Overload relays respond too slowly to interrupt fault current. Short-circuit protection must be provided by fuses or circuit breakers.
With limited exceptions, yes. Most motors must be protected in accordance with NEC Article 430, using nameplate data to determine proper settings.
Thermal damage accumulates over time. Ambient temperature, ventilation, and duty cycle all affect heating, even when the measured current appears acceptable.
Explore 50+ live, expert-led electrical training courses –